By: K. T. Chui
We are all road users and desire a safe road environment. According to the World Health Organization (WHO), the annual global road traffic accidents have led to 1.35 million and 50 million deaths and injuries, respectively [1]. It is the top and 8th cause of death for the age group of 5-29 and population, respectively. The 2030 Agenda for Sustainable Development sets up a goal to halve the number of deaths and injuries due to road traffic accidents by 2030 [2]. The target is argued to be ambitious because the statistics have remained relatively constant in the past decade. A variety of measures have been proposed for road safety, such as preventive inspections of vehicles, legislation, education, and speed limit, which have a limited impact on the target.
Three poor driving statuses lead to accidents, namely drowsy driving, stressed driving, and distracted driving. Surveys revealed the prevalence of drowsy driving, stressed driving, and distracted driving as 54%, 90%, and all [3-5]. Machine learning-based detection models providing detection on current drivers’ status would help to provide a real-time warning. In reality, this may not help prevent traffic accidents as the average reaction time may vary from 0.5 s to 1.5s reported in some studies [6,7]. As a result, machine learning-based prediction models providing in-advance prediction would help prevent traffic accidents.
Based on Scopus and Web of Science, about 83 articles were shortlisted with a research focus on prediction models for in-advance prediction in drowsy, stressed, or distracted driving. It is estimated that the ratio of prediction models is less than 1% compared with those for detection models. In some articles, layman’s terms may be used to interchange between prediction, detection, classification, and recognition. This causes confusion with the vigorous definition in machine learning.
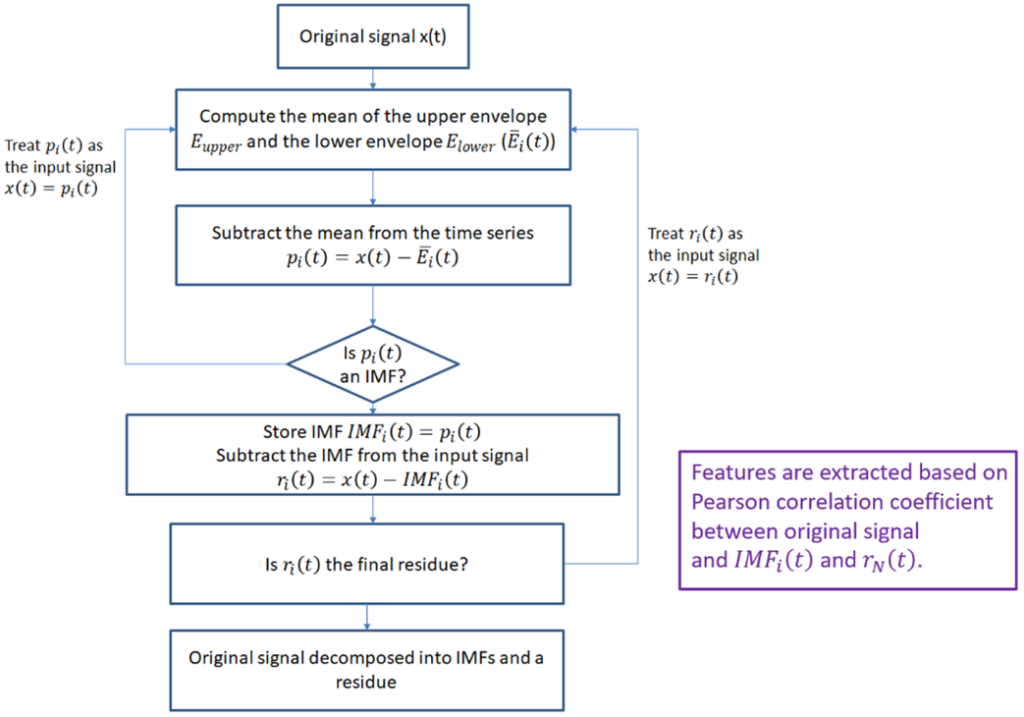
Here is an example on the formulation of prediction models via empirical mode decomposition as feature extraction (Figure 1) and long short-term memory as prediction model (Figure 2) [8].

Here are two popular driving datasets for performance evaluation of the predictions models.
- SRAD database [9]
- UAH-DriveSet [10]
Open Research Problems
Here are some research directions:
- The predictability of the prediction model should be strong to meet the varying time of in-advance prediction in reality.
- Consider ensemble learning of famous prediction algorithms such as LSTM, GRU, and RNN for optimal performance.
- Generate more training data via data augmentation and generation techniques.
References
[1] Global Status Report on Road Safety 2018, World Health Organization
[2] Transforming Our World: The 2030 Agenda for Sustainable Development, United Nations,
[3] European Commission, Fatigue, European Commission, Directorate General for Transport, September 2015.
[4] Pfeiffer, J.L., Pueschel, K., Seifert, D.: Interpersonal violence in road rage. Cases from the Medico-Legal Center for Victims of Violence in Hamburg. J. Forensic Leg. Med. 39, 42—45 (2016).
[5] Royal, D., Street, F., Suite, N.W.: National Survey of Distracted and Drowsy Driving Attitudes and Behavior. Technical report, National Highway Traffic Safety Administration, (2002).
[6] Arbabzadeh, N., Jafari, M., Jalayer, M., Jiang, S., Kharbeche, M.: A hybrid approach for identifying factors affecting driver reaction time using naturalistic driving data. Transp. Res. Part C Emerg. Technol. 100, 107–124 (2019).
[7] Dickerson, A.E., Reistetter, T.A., Burhans, S., Apple, K.: Typical Brake Reaction Times Across the Life Span. Occup. Ther. Health Care 30, 115–123 (2016).
[8] Chui, K. T., Zhao, M., Gupta, B. B.: Long Short-Term Memory Networks for Driver Drowsiness and Stress Prediction. In International Conference on Intelligent Computing & Optimization, 670–680 (2020, December)
[9] Healey, J.A., Picard, R.W.: Detecting stress during real-world driving tasks using physiological sensors. IEEE Trans. Intell. Transp. 6, 156–166 (2005)
[10] Romera, E., Bergasa, L. M., Arroyo, R: Need data for driver behaviour analysis? Presenting the public UAH-DriveSet. In 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC). 387–392 (2016, November)